


三維激光掃描技術(shù)在地質(zhì)災(zāi)害調(diào)查中的應(yīng)用
三維激光掃描技術(shù)是近幾年發(fā)展起來(lái)的一種新興測(cè)繪技術(shù),該技術(shù)已廣泛應(yīng)用于工程建設(shè)與物體三維測(cè)量等測(cè)繪及相關(guān)領(lǐng)域,具有高效率、高精度的獨(dú)特優(yōu)勢(shì)。本文在介紹三維激光掃描儀的工作原理的基礎(chǔ)上,以邢臺(tái)峽谷群地質(zhì)災(zāi)害調(diào)查為應(yīng)用研究對(duì)象。為了更夠在地質(zhì)災(zāi)害發(fā)生前,對(duì)地質(zhì)敏感區(qū)域進(jìn)行很好的預(yù)警工作。利用三維激光掃描設(shè)備能夠快速獲取現(xiàn)場(chǎng)高精度三維數(shù)據(jù),結(jié)合三維激光處理軟件,生成相對(duì)應(yīng)的地質(zhì)剖面圖、局部細(xì)節(jié)尺寸等信息,對(duì)應(yīng)急災(zāi)害提供精準(zhǔn)可靠的基礎(chǔ)數(shù)據(jù)。
三維激光掃描原理與方法
1.三維激光掃描儀基本原理
三維激光掃描儀的工作過(guò)程,實(shí)際上就是一個(gè)不斷重復(fù)的數(shù)據(jù)采集和處理過(guò)程,它通過(guò)具有一定分辨率的空間點(diǎn)(坐標(biāo)x,y,z,其坐標(biāo)系是一個(gè)與掃描儀設(shè)置位置和掃描姿態(tài)有關(guān)的儀器坐標(biāo)系)所組成的點(diǎn)云圖來(lái)表達(dá)系統(tǒng)對(duì)目標(biāo)物體表面的采樣結(jié)果。三維激光掃描技術(shù)是將實(shí)體的三維復(fù)雜信息通過(guò)激光的捕獲形成帶有屬性信息的實(shí)體三維點(diǎn)云模型,通過(guò)高速激光的掃描測(cè)量,獲取目標(biāo)的點(diǎn)、線、面、體、空間等三維實(shí)測(cè)數(shù)據(jù)進(jìn)行高精度三維逆向建模,又稱(chēng)實(shí)景復(fù)制技術(shù)。
2.數(shù)據(jù)處理方法
為了能夠得到好的三維點(diǎn)云數(shù)據(jù)需要對(duì)采集的原始數(shù)據(jù)進(jìn)行處理,數(shù)據(jù)處理通常包括各測(cè)站點(diǎn)云數(shù)據(jù)拼接配準(zhǔn)、數(shù)據(jù)去噪和坐標(biāo)轉(zhuǎn)換等操作,數(shù)據(jù)拼接通過(guò)有多種方法,無(wú)目標(biāo)拼接、有目標(biāo)拼接以及采集過(guò)程實(shí)時(shí)自動(dòng)處理拼接。
三維激光掃描儀數(shù)據(jù)采集及點(diǎn)云處理
1.項(xiàng)目概況
河北邢臺(tái)峽谷群國(guó)家地質(zhì)公園1:1萬(wàn)地質(zhì)災(zāi)害詳細(xì)調(diào)查的測(cè)量工作,是依據(jù)邢臺(tái)市國(guó)土資源局組織專(zhuān)家評(píng)審的《河北邢臺(tái)峽谷群國(guó)家地質(zhì)公園1:1萬(wàn)地質(zhì)災(zāi)害詳細(xì)調(diào)查設(shè)計(jì)書(shū)》開(kāi)展工作的。測(cè)繪主要工作內(nèi)容為:①1:200剖面測(cè)量;②1:500剖面測(cè)量;③1:200立面測(cè)量。其中地質(zhì)剖面測(cè)量和立面測(cè)量工作主要是通過(guò)三維激光掃描設(shè)備進(jìn)行數(shù)據(jù)的采集和處理,從而提交相應(yīng)的符合精度要求的成果數(shù)據(jù)及報(bào)告。
本項(xiàng)目采用Trimble SX10三維激光掃描儀完成大量測(cè)量工作,由于三維激光掃描需要將三維激光掃描儀獨(dú)立坐標(biāo)系統(tǒng)引入到當(dāng)?shù)亟^對(duì)坐標(biāo)系統(tǒng)中,所以本項(xiàng)目在每個(gè)地質(zhì)災(zāi)害點(diǎn)布設(shè)圖根點(diǎn)1個(gè),圖根點(diǎn)采用河北省衛(wèi)星定位綜合服務(wù)系統(tǒng)(HBCORS)。
2.設(shè)備投入
Trimble R8 GNSS接收機(jī)3套,Trimble SX10掃描機(jī)器人1臺(tái),配套電子手簿、計(jì)算機(jī)等硬件及Trimble Business Center (以下簡(jiǎn)稱(chēng):TBC)、Trimble RealWorks、Office等軟件。
3.外業(yè)數(shù)據(jù)采集
三維激光掃描技術(shù)相對(duì)于傳統(tǒng)數(shù)據(jù)采集方式具有更高精度、遠(yuǎn)距離獲取等優(yōu)勢(shì)。本項(xiàng)目利用三維激光掃描技術(shù)進(jìn)行地質(zhì)點(diǎn)三維點(diǎn)云數(shù)據(jù)的采集以及獲取,結(jié)合生成的地質(zhì)剖面模型進(jìn)行了地質(zhì)點(diǎn)處地質(zhì)剖面和立面測(cè)量工作。首先,根據(jù)各地質(zhì)災(zāi)害點(diǎn)的區(qū)域大小、位置等情況,規(guī)劃掃描站數(shù)和需要測(cè)量的特征點(diǎn),利用天寶SX10進(jìn)行數(shù)據(jù)的掃描,采集點(diǎn)云數(shù)據(jù)和全站儀特征點(diǎn)數(shù)據(jù),內(nèi)業(yè)主要利用TBC、Trimble RealWorks軟件處理點(diǎn)云數(shù)據(jù),生成相應(yīng)地質(zhì)災(zāi)害點(diǎn)的剖面線和立面圖等成果。
點(diǎn)云數(shù)據(jù)的采集分為準(zhǔn)備工作和掃描兩個(gè)階段。準(zhǔn)備工作主要是對(duì)現(xiàn)場(chǎng)進(jìn)行踏勘,了解現(xiàn)場(chǎng)的具體環(huán)境,找出實(shí)地環(huán)境比較開(kāi)闊而地方進(jìn)行測(cè)站位置的選取,測(cè)站位置必須保證以最少的測(cè)站數(shù)獲取所有的目標(biāo)數(shù)據(jù),根據(jù)測(cè)站位置以及每一站的掃描范圍來(lái)決定整體工作流程,每個(gè)測(cè)站利用已知控制點(diǎn)進(jìn)行定向工作,使用SX10設(shè)計(jì)測(cè)站,掃描所需要的點(diǎn)云,再利用SX10全站儀功能測(cè)量一些特征點(diǎn),這些特征點(diǎn)可以用來(lái)檢核點(diǎn)云精度。SX10三維激光掃描儀最大掃描測(cè)程可以達(dá)到600米范圍,掃描速度高達(dá)每秒26600個(gè)點(diǎn),激光光斑尺寸100米處僅14毫米,最高掃描精度1mm,測(cè)角精度可以達(dá)到1″。
數(shù)據(jù)采集現(xiàn)場(chǎng)")
外業(yè)數(shù)據(jù)采集現(xiàn)場(chǎng)
4.點(diǎn)云數(shù)據(jù)處理及分析
點(diǎn)云數(shù)據(jù)分析:由于地質(zhì)環(huán)境周?chē)闹脖换蛉斯そㄖ镆约疤鞖庥跋瘢c(diǎn)云數(shù)據(jù)存在少量系統(tǒng)誤差和噪聲,不能直接使用且點(diǎn)云數(shù)據(jù)量大,會(huì)消耗巨大的存儲(chǔ)空間,因此需要對(duì)點(diǎn)云數(shù)據(jù)分析,判定點(diǎn)云是否存在未掃描的部位,若存在缺失部分,需要進(jìn)行重新掃描,如果數(shù)據(jù)存在較小的空洞,即可進(jìn)行補(bǔ)洞處理。
云")
在TBC中加載后的原始三維點(diǎn)云
點(diǎn)云數(shù)據(jù)去噪處理:在三維幾何模型中,特征和噪聲往往具有一些類(lèi)似的幾何屬性為了將噪聲與特征區(qū)分開(kāi)來(lái),將不連續(xù)、變化大的點(diǎn)云數(shù)據(jù)看作噪聲,而將連續(xù)的起伏小的點(diǎn)云視為特征信息。理論上想要達(dá)到的去噪效果是在去除噪聲的同時(shí)盡可能保留點(diǎn)云數(shù)據(jù)的特征信息,但在點(diǎn)云數(shù)據(jù)的實(shí)際處理過(guò)程中,不僅僅需要去噪,還需要對(duì)模型的表面進(jìn)行重新構(gòu)建,使模型表面的曲面保持連續(xù)性。本項(xiàng)目根據(jù)點(diǎn)云數(shù)據(jù)情況,采用雙邊濾波算法進(jìn)行點(diǎn)云去噪,通過(guò)將點(diǎn)云數(shù)據(jù)利用TBC導(dǎo)出LAS格式后導(dǎo)入Trimble Real Works中進(jìn)行點(diǎn)云處理,Trimble RealWorks是專(zhuān)業(yè)的激光點(diǎn)云處理軟件,具有方便快捷的點(diǎn)云處理功能。
點(diǎn)云數(shù)據(jù)簡(jiǎn)化:點(diǎn)云數(shù)據(jù)具有海量數(shù)據(jù)的特點(diǎn),其采集原理是以所需精度為間隔進(jìn)行點(diǎn)云數(shù)據(jù)采集,這也造成了在地質(zhì)剖面上曲率較小的位置點(diǎn)云數(shù)據(jù)冗余的現(xiàn)象,因此需要對(duì)點(diǎn)云數(shù)據(jù)進(jìn)行簡(jiǎn)化。本項(xiàng)目采用曲率采樣的方式進(jìn)行簡(jiǎn)化,其主要思想為: 盡量保留曲率大的區(qū)域的點(diǎn)云數(shù)據(jù),以保證點(diǎn)云的細(xì)節(jié)特征,利用Trimble RealWorks具有的獨(dú)特算法通過(guò)減少曲率小的區(qū)域的點(diǎn)云數(shù)據(jù)的方式來(lái)減少數(shù)據(jù)冗余。
曲率大的區(qū)域進(jìn)行點(diǎn)云處理")
Realworks對(duì)曲率大的區(qū)域進(jìn)行點(diǎn)云處理
表面模型生成:數(shù)據(jù)導(dǎo)入TBC可得到點(diǎn)云數(shù)據(jù),利用Trimble RealWorks軟件自動(dòng)分類(lèi)地面、建筑物、電線桿和標(biāo)志、高植被。軟件可以通過(guò)對(duì)應(yīng)的算法剔除周?chē)碾s點(diǎn),根據(jù)效果抽稀點(diǎn)云。在剔除植被、地物等非地貌部分點(diǎn)云數(shù)的基礎(chǔ)上,利用Trimble RealWorks基于點(diǎn)云數(shù)據(jù)生成三維模型,并對(duì)有問(wèn)題的部分進(jìn)行修改編輯。
數(shù)據(jù)成果生成:在Trimble RealWorks軟件中,根據(jù)實(shí)際項(xiàng)目需求,進(jìn)行相應(yīng)位置和區(qū)域的地質(zhì)剖面線和立面圖的生成,并可根據(jù)現(xiàn)場(chǎng)已有控制點(diǎn),或利用SX10 全站儀功能測(cè)量的特征點(diǎn)進(jìn)行相應(yīng)誤差檢核工作。Trimble RealWorks數(shù)據(jù)處理軟件可以將剖面線、立面圖數(shù)據(jù)導(dǎo)出為CAD(DXF/DWG)、GIS(SHP) 等格式的數(shù)據(jù)成果。
處理好的點(diǎn)云數(shù)據(jù)進(jìn)行剖面切割")
對(duì)處理好的點(diǎn)云數(shù)據(jù)進(jìn)行剖面切割
測(cè)量過(guò)程中出現(xiàn)的技術(shù)問(wèn)題及處理情況
由于項(xiàng)目區(qū)域位于都位于山區(qū),測(cè)量時(shí)間為初夏,山區(qū)存在很多樹(shù)木、草叢等植被,SX10外業(yè)掃描時(shí)也會(huì)把這些植被掃描進(jìn)行來(lái),這就需要內(nèi)業(yè)處理時(shí)剔除這些植被和草叢數(shù)據(jù),否則會(huì)影響剖面線和立面圖等數(shù)據(jù)成果的精度。SX10后處理軟件采用Trimble TBC、Trimble RealWorks軟件,該軟件具有點(diǎn)云自動(dòng)分類(lèi)功能,可以在剔除植被、雜點(diǎn)、噪點(diǎn)之后在進(jìn)行相應(yīng)數(shù)據(jù)成果的生成,并進(jìn)行相應(yīng)的數(shù)據(jù)成果精度檢驗(yàn)。
結(jié)語(yǔ)
本項(xiàng)目通過(guò)利用三維激光掃描技術(shù)獲取到地質(zhì)區(qū)域的高密度、高精度的三維點(diǎn)云數(shù)據(jù),對(duì)與處理好的三維點(diǎn)云進(jìn)行特征提取,精確獲得整個(gè)坡體地面現(xiàn)狀,通過(guò)對(duì)典型區(qū)域進(jìn)行處理分析,進(jìn)行地質(zhì)災(zāi)害嚴(yán)重性的預(yù)判和應(yīng)急處理。三維激光掃描技術(shù)具有絕對(duì)的先進(jìn)技術(shù)優(yōu)勢(shì)和應(yīng)用潛力,這種數(shù)據(jù)獲取方法具有無(wú)需事先埋設(shè)監(jiān)測(cè)設(shè)備、非接觸測(cè)量、作業(yè)速度快、測(cè)量精度高,能夠及時(shí)的反應(yīng)地質(zhì)災(zāi)害隱患區(qū)域的總體形態(tài),比較適合大型地質(zhì)災(zāi)害監(jiān)測(cè),具有一定的現(xiàn)實(shí)意義和應(yīng)用價(jià)值。
更多相關(guān)

移動(dòng)測(cè)繪 | 車(chē)載移動(dòng)測(cè)繪照進(jìn)實(shí)景三維現(xiàn)實(shí)
LeighSurveyors公司總部位于澳大利亞布里斯班,專(zhuān)注于交通基礎(chǔ)設(shè)施市場(chǎng)。該公司通過(guò)持續(xù)對(duì)激光雷達(dá)、掃描機(jī)器人以及對(duì)最新移動(dòng)測(cè)繪技術(shù)的投資,提供更全面、更精確的解決方案,保持著行業(yè)領(lǐng)先地位,...

中緯ZDL700數(shù)字水準(zhǔn)儀在建筑物沉降觀測(cè)中的應(yīng)用
應(yīng)用背景 隨著經(jīng)濟(jì)的迅速發(fā)展和科學(xué)技術(shù)的不斷進(jìn)步,使得許多工程項(xiàng)目在建設(shè)的過(guò)程中對(duì)其施工的準(zhǔn)確度要求越來(lái)越高。因此,各種新技術(shù)、新功能的測(cè)量?jī)x器也不斷涌現(xiàn),而電子水準(zhǔn)儀更是得到了推廣和普及。電子...

RTK CORS賬號(hào)設(shè)置步驟教程圖文指南,看完迅速掌握
中緯RTK是一款高精度實(shí)時(shí)動(dòng)態(tài)差分測(cè)量系統(tǒng),采用GNSS技術(shù),支持多星多頻,定位精度達(dá)厘米級(jí)。由中緯公司研發(fā),廣泛應(yīng)用于測(cè)繪、工程測(cè)量、國(guó)土調(diào)查等領(lǐng)域。該系統(tǒng)通...

【技術(shù)指南】中緯ZOOM75&ZOOM95測(cè)量機(jī)器人測(cè)量操作
具體詳細(xì)步驟首先進(jìn)入到要設(shè)置的作業(yè),在測(cè)量主界面,點(diǎn)擊【設(shè)站】,進(jìn)入設(shè)站、定向界面。按需選擇定向方法,完成設(shè)站、定向,本次以“已知方位角定向”為例,選擇完成后,點(diǎn)擊【下一步】。選擇或輸入測(cè)站、儀器高,...
帶您了解全國(guó)CORS和移動(dòng)CORS的區(qū)別
最近有許多客戶給環(huán)球咨詢關(guān)于“QX全國(guó)CORS和移動(dòng)CORS的區(qū)別”,今天環(huán)球測(cè)繪就給大家一一解答!首先先介紹兩種CORS賬號(hào)的共同點(diǎn),接著再將區(qū)別整理出來(lái)方便選購(gòu)。 QX全國(guó)CORS和移動(dòng)CORS...

GPS不再是唯一選擇,北斗三號(hào)衛(wèi)星體系即將建設(shè)完成
古有司南,今有北斗。 衛(wèi)星導(dǎo)航定位市場(chǎng)長(zhǎng)期被GPS等國(guó)外企業(yè)壟斷的情況下,國(guó)產(chǎn)自主研發(fā)的北斗三代導(dǎo)航衛(wèi)星將迎來(lái)“全球時(shí)代”的關(guān)鍵時(shí)刻。 而說(shuō)到北斗導(dǎo)航系統(tǒng)的國(guó)產(chǎn)化替代之路,少不了孫家棟的貢獻(xiàn)。...

徠卡GNSS助力川藏鐵路控制測(cè)量
2020年11月8日,史詩(shī)級(jí)國(guó)家工程川藏鐵路雅安至林芝段開(kāi)工建設(shè),計(jì)劃工期10年,雅林段是業(yè)內(nèi)公認(rèn)的鐵路建設(shè)“最難段”,這一段的開(kāi)工意味著川藏鐵路正式全線開(kāi)建。 今天,川藏鐵路全線能順利開(kāi)工,離...
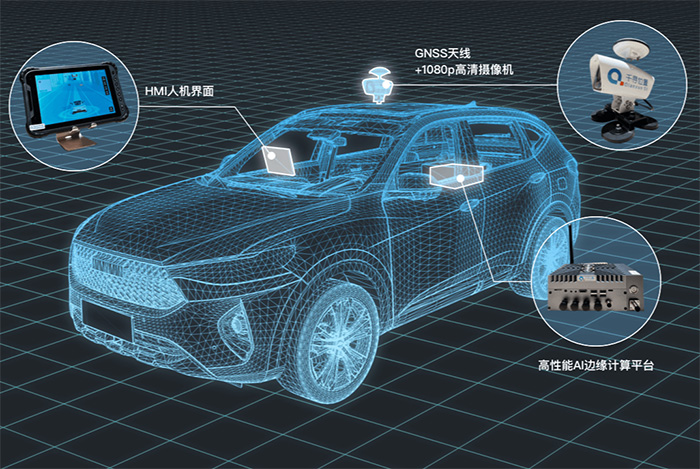
千尋馳觀道路智能巡檢系統(tǒng)
千尋馳觀道路智能巡檢系統(tǒng):數(shù)字化賦能交通基礎(chǔ)設(shè)施智慧化管理一、系統(tǒng)概述千尋馳觀道路智能巡檢系統(tǒng)是由千尋位置網(wǎng)絡(luò)有限公司(以下簡(jiǎn)稱(chēng)“千尋位置”)推出的一款基于高精度定位、人工智能(AI)及云計(jì)算技術(shù)的道...
 環(huán)球測(cè)繪微信
環(huán)球測(cè)繪微信